
STM32F103C8T6使用DHT11采集温湿度
平台:Windows 7
编译环境:MDK5.23
涉及硬件:STM32F103C8T6、DHT11模块
前些天在某宝买了一块STM32F103C8T6核心板,想着学习一下,花了几天时间看文档,对这块板子有了一些了解之后开始做些小项目,又苦于没有思路,看着两年前玩51的时候剩下来的一些模块,就打算先用STM32把这些模块驱动起来,巩固一下这段时间所学。这也是我写的第一篇博客,排版比较丑,大家谅解一下。
1 DHT11简介
DHT11 是一款湿温度一体化的数字传感器。该传感器包括一个电阻式测湿元件和一个 NTC测温元件,并与一个高性能 8 位单片机相连接。通过单片机等微处理器简单的电路连接就能够实时的采集本地湿度和温度。 DHT11 与单片机之间能采用简单的单总线进行通信,仅仅需要一个 I/O 口。传感器内部湿度和温度数据 40Bit 的数据一次性传给单片机,数据采用校验和方式进行校验,有效的保证数据传输的准确性。 DHT11 功耗很低, 5V 电源电压下,工作平均最大电流 0.5mA。
DHT11 的技术参数如下:
工作电压范围: 3.3V-5.5V
工作电流 :平均 0.5mA
输出:单总线数字信号
测量范围: 湿度 20~90%RH,温度 0~50℃
精度 :湿度±5%,温度±2℃
分辨率 :湿度 1%,温度 1℃
1.1 DHT11数据格式
DHT11采用单总线数据结构,其数据包由 5Byte(40Bit)组成。数据分小数部分和整数部分,一次完整的数据传输为40bit,高位先出。DHT11 的数据格式为: 8bit 湿度整数数据+8bit 湿度小数数据+8bit 温度整数数据+8bit 温度小数数据+8bit 校验和。其中校验和数据为前四个字节相加。注:传感器输出的数据为未编码的二进制数据。
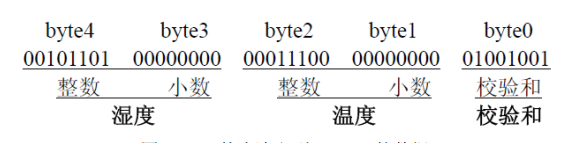
如下图:
由以上数据就可得到湿度和温度的值,计算方法:
湿度= byte4 . byte3=45.0 (%RH)
温度= byte2 . byte1=28.0 ( ℃)
校验= byte4+ byte3+ byte2+ byte1=73(=湿度+温度)(校验正确)
注意:DHT11发送顺序为从低位到高位,Byte是先湿度后温度,先整数后小数,最后校验和。
1.2 DHT11通信方式
首先主机发送开始信号,即:拉低数据线,保持 t1(至少 18ms)时间,然后拉高数据线 t2(20~40us)时间,然后读取 DHT11 的响应,正常的话, DHT11 会拉低数据线,保持 t3(40~50us)时间,作为响应信号,然后 DHT11 拉高数据线,保持 t4(40~50us)时间后,开始输出数据。
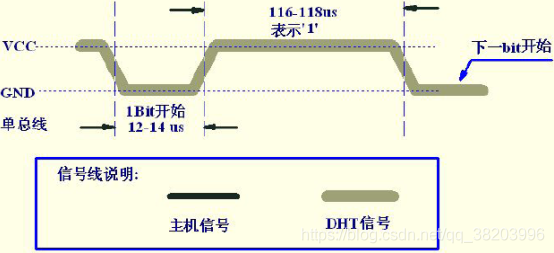
上图很容易看懂,这里不做多说,后面会有详细的讲解。因为没有时钟同步信号,DHT11发送的数据不是传统的“高电平就是1,低电平就是0”,而是在每发送一个bit前,拉低电平 12 ~14us。数据是体现在拉高电平时间的长短,拉高电平26 ~28us,就为0,拉高电平116 ~118us就为1。
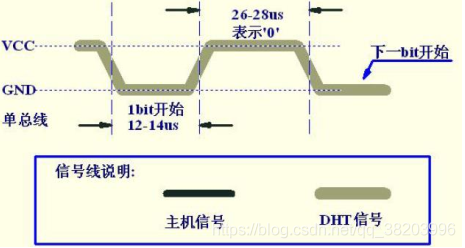
下面会通过程序讲解具体过程。
2 步骤讲解
2.1 主机发送开始信号
这比较简单,通过IO口输出低电平至少18ms,再输出高电平20~40us之间的一个时间就行了,然后关闭端口。
/**********************************************
函数名:static void DHT11_Rst(void)
参数说明:无
返回值:无
函数作用:主机发送开始信号
***********************************************/
static void DHT11_Rst(void)
{
GPIO_SETOUT(); //配置成输出模式
GPIO_ResetBits(DHT11_IO,DHT11_PIN); //拉低数据线
Delay_ms(20); //拉低至少18ms
GPIO_SetBits(DHT11_IO,DHT11_PIN); //拉高数据线
Delay_us(30); //主机拉高20~40us
GPIO_ResetBits(DHT11_IO,DHT11_PIN);
}
2.2 主机接收DHT11响应信号
DHT11响应信号是先拉低电平40~50us,再拉高电平40 ~50us。由此我们可以配置IO口为输入模式,检测电平时间。至于为啥不用定时器和外部中断,因为麻烦啊(有更简单的为啥不用)。
/**********************************************
函数名:static u8 DHT11_Check(void)
参数说明:无
返回值:检测到回应-->返回1,否则0
函数作用:检测DHT11的响应信号
***********************************************/
static u8 DHT11_Check(void)
{
u8 retry=0;
GPIO_SETIN(); //设置为输入模式
while (!GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN) && retry<100)//DHT11会拉低40~50us
{
retry++;
Delay_us(1);
}
if(retry >= 100) //超时未响应/未收到开始信号,退出检测
return 0;
else
retry = 0;
while (GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN) && retry<100)//DHT11拉低后会再次拉高40~50us
{
retry++;
Delay_us(1);
}
if(retry>=100) //超时,DHT11工作出错,退出检测
return 0;
return 1; //设备正常响应,可以正常工作
}
上面代码我注释得比较全,这里我就不多讲解了。
2.3 主机接收DHT11发送的数据
接收数据其实就是每次响应完,DHT11拉低电平准备发送数据到发送下一个数据拉电平之间的高电平时间长短,我们先来回顾一下,高电平持续时间为116~118us,表示发送的为1。高电平持续时间为26 ~28us。所以我们只要判断,如果30us后还处于高电平的话,此时发送的数据就为1,否则为0。需要注意的是,发送完‘0’后,拉低电平的时间仅12 ~ 14us,所以计算时间不能大于这个,否则会丢失数据。
/**********************************************
函数名:static u8 DHT11_Read_Bit(void)
参数说明:无
返回值:返回从DHT11上读取的一个Bit数据
函数作用:从DHT11上读取一个Bit数据
***********************************************/
static u8 DHT11_Read_Bit(void)
{
u8 retry = 0;
//DHT11的Bit开始信号为12-14us低电平
while(GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN) && retry<100)//等待变为低电平(等待Bit开始信号)
{
retry++;
Delay_us(1);
}
retry = 0;
while(!GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN) && retry<100)//等待变高电平(代表数据开始传输)
{
retry++;
Delay_us(1);
}
Delay_us(30);//等待30us
//0信号为26-28us,1信号则为116-118us,所以说超过30us去读取引脚状态就可以知道传输的值了
if(GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN)) return 1;
else return 0;
}
这样我们就完成一个位的数据接收了,那么怎么组成一个字节,一整段数据呢,请看下面代码,如果不太清楚,先去查一下移位操作。
接收一个字节:
/***********************************************************************
函数名:static u8 DHT11_Read_Byte(void)
参数说明:无
返回值:返回从DHT11上读取的一个byte数据
函数作用:从DHT11上读取一个byte数据
************************************************************************/
static u8 DHT11_Read_Byte(void)
{
u8 i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
接收一次完整的数据,还需要对数据进行校验,只有校验正确了,我们才去取这个数据,数据校验方法:前面四个byte相加等于第五个byte值,即为校验通过。下面为实现代码:
/**************************************************************************
函数名:u8 DHT11_Read_Data(u8 *temp,u8 *humi)
参数说明:temp:用于存放温度值(范围:0~50°),humi:用于存放湿度值(范围:20%~90%)
返回值:1:成功读取数据,0:读取数据出错
函数作用:从DHT11上读取温湿度数据(这里省略小数值)
***************************************************************************/
u8 DHT11_Read_Data(u8 *temp,u8 *humi)
{
u8 buf[5];
u8 i;
DHT11_Rst();
if(DHT11_Check()==1) //设备响应正常
{
for(i=0;i<5;i++)//读取40位数据
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])//进行校验
{
*humi=buf[0];
*temp=buf[2];
}
}else return 0; //设备未成功响应,返回0
return 1; //读取数据成功返回1
}
3 完整程序代码
delay.c
#include "delay.h"
u32 SysTic_count = 100;
//使用系统滴答计时器精准延时
void Delay_ms(u16 ms)
{
SysTic_count = ms;
SysTick_Config(72000); //默认设置为sysclock,1s计数72000000次,则1ms中断一次
while( SysTic_count!= 0);//等待计时完成
SysTick->CTRL = 0; //关闭滴答计时器
}
/* 定时微秒级函数 */
void Delay_us(u32 us)
{
SysTic_count = us;
SysTick_Config(72); //默认设置为sysclock,1s计数72000000次,则1us中断一次
while( SysTic_count!= 0);//等待计时完成
SysTick->CTRL = 0; //关闭滴答计时器
}
/* sysTick中断处理函数 */
void SysTick_Handler(void)
{
if(SysTic_count != 0) SysTic_count--;
}
注意:这里sysTick_Handler函数编译的时候会报错,请将stm32f10x_it.c文件中的sysTick_Handler函数注释掉
main.c
#include "stm32f10x.h"
#include "usart.h"
#include "delay.h"
#include "DHT11.h"
/*
*读取温湿度传感器DHT11的值,并用串口打印出来
*/
void clock_init(void);
u8 temp = 0,humi = 0;
/**************************************************************************
函数名:int main(void)
参数说明:无
返回值:无
函数作用:主函数
***************************************************************************/
int main(void)
{
clock_init();
uart_init(115200); //初始化串口
printf("wecome to DHT11");
//初始化DHT11(有BUG,第一次上电总是失败,按一下复位按钮又能进了)
if(!DHT11_Init()){
printf("\r\n EEROR! THE DHT11 HAS NO RESPOND...");
//while(1);
}
printf("\r\n THE DHT11 HAS RESPOND");
Delay_ms(10); //这里延时10ms主要是因为,刚刚接收到响应信息,要等DHT11发送完信息
while(1)
{
if(DHT11_Read_Data(&temp,&humi))
printf("\r\n temp:%d,humi:%d",temp,humi);
else
printf("\r\n EEROR! THE DHT11 HAS NO RESPOND...");//由于是库函数编程,不能准确把握函数的执行时间,
//所以会经常出现这条警告信息
Delay_ms(100);//建议不要低于这个数值
}
}
/**************************************************************************
函数名:void clock_init(void)
参数说明:无
返回值:无
函数作用:开启高速外部时钟,
ADCCLK设置为12MHZ, SYSCLK设置为72Mhz,PCLK1设置为36MHZ,PKLC2设置为72mhz
***************************************************************************/
void clock_init(void)
{
RCC->CR = 0x1010000;
RCC->CFGR = 0x1DC402;
}
DHT11.c
#include "DHT11.h"
GPIO_InitTypeDef GPIO_InitStructure; //后面会改变输入输出状态
static void GPIO_SETOUT(void);
static void GPIO_SETIN(void);
static u8 DHT11_Check(void);
/**********************************************
函数名:static void DHT11_Rst(void)
参数说明:无
返回值:无
函数作用:主机发送开始信号
***********************************************/
static void DHT11_Rst(void)
{
GPIO_SETOUT(); //配置成输出模式
GPIO_ResetBits(DHT11_IO,DHT11_PIN); //拉低数据线
Delay_ms(20); //拉低至少18ms
GPIO_SetBits(DHT11_IO,DHT11_PIN); //拉高数据线
Delay_us(30); //主机拉高20~40us
GPIO_ResetBits(DHT11_IO,DHT11_PIN);
}
/**********************************************
函数名:u8 DHT11_Init(void)
参数说明:无
返回值:u8 ,返回1代表初始化成功,0则失败
函数作用:配置IO口,并发送开始信号
***********************************************/
u8 DHT11_Init(void){
//IO口配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//换IO口需要修改
GPIO_InitStructure.GPIO_Pin = DHT11_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出,如果需要考虑到IC的电流驱动能力时要接上拉电阻(5K)
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(DHT11_IO,&GPIO_InitStructure);
DHT11_Rst();//发送开始信号
return DHT11_Check();//检测DHT11的响应
}
/**********************************************
函数名:static void GPIO_SETOUT(void)
参数说明:无
返回值:无
函数作用:配置IO口为推挽输出模式
***********************************************/
static void GPIO_SETOUT(void)
{
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出,如果需要考虑到IC的电流驱动能力时要接上拉电阻(5K)
GPIO_Init(DHT11_IO,&GPIO_InitStructure);
}
/**********************************************
函数名:static void GPIO_SETIN(void)
参数说明:无
返回值:无
函数作用:配置IO口为浮空输入模式
***********************************************/
static void GPIO_SETIN(void)
{
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入模式
GPIO_Init(DHT11_IO,&GPIO_InitStructure);
}
/**********************************************
函数名:static u8 DHT11_Check(void)
参数说明:无
返回值:检测到回应-->返回1,否则0
函数作用:检测DHT11的响应信号
***********************************************/
static u8 DHT11_Check(void)
{
u8 retry=0;
GPIO_SETIN(); //设置为输入模式
while (!GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN) && retry<100)//DHT11会拉低40~50us
{
retry++;
Delay_us(1);
}
if(retry >= 100) //超时未响应/未收到开始信号,退出检测
return 0;
else
retry = 0;
while (GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN) && retry<100)//DHT11拉低后会再次拉高40~50us
{
retry++;
Delay_us(1);
}
if(retry>=100) //超时,DHT11工作出错,退出检测
return 0;
return 1; //设备正常响应,可以正常工作
}
/**********************************************
函数名:static u8 DHT11_Read_Bit(void)
参数说明:无
返回值:返回从DHT11上读取的一个Bit数据
函数作用:从DHT11上读取一个Bit数据
***********************************************/
static u8 DHT11_Read_Bit(void)
{
u8 retry = 0;
//DHT11的Bit开始信号为12-14us低电平
while(GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN) && retry<100)//等待变为低电平(等待Bit开始信号)
{
retry++;
Delay_us(1);
}
retry = 0;
while(!GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN) && retry<100)//等待变高电平(代表数据开始传输)
{
retry++;
Delay_us(1);
}
Delay_us(30);//等待30us
//0信号为26-28us,1信号则为116-118us,所以说超过30us去读取引脚状态就可以知道传输的值了
if(GPIO_ReadInputDataBit(DHT11_IO,DHT11_PIN)) return 1;
else return 0;
}
/***********************************************************************
函数名:static u8 DHT11_Read_Byte(void)
参数说明:无
返回值:返回从DHT11上读取的一个byte数据
函数作用:从DHT11上读取一个byte数据
************************************************************************/
static u8 DHT11_Read_Byte(void)
{
u8 i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
/**************************************************************************
函数名:u8 DHT11_Read_Data(u8 *temp,u8 *humi)
参数说明:temp:用于存放温度值(范围:0~50°),humi:用于存放湿度值(范围:20%~90%)
返回值:1:成功读取数据,0:读取数据出错
函数作用:从DHT11上读取温湿度数据(这里省略小数值)
***************************************************************************/
u8 DHT11_Read_Data(u8 *temp,u8 *humi)
{
u8 buf[5];
u8 i;
DHT11_Rst();
if(DHT11_Check()==1) //设备响应正常
{
for(i=0;i<5;i++)//读取40位数据
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])//进行校验
{
*humi=buf[0];
*temp=buf[2];
}
}else return 0; //设备未成功响应,返回0
return 1; //读取数据成功返回1
}
DHT11.h
#ifndef __DHT11_H
#define __DHT11_H
#include "stm32f10x.h"
#include "delay.h"
/* 设置GPIO脚,默认为PB11 */
#define DHT11_IO GPIOB
#define DHT11_PIN GPIO_Pin_11
/* 初始化函数,如果DHT11存在响应则返回1,否则0 */
u8 DHT11_Init(void);
/* 从DHT11读取数据,没有小数部分 */
u8 DHT11_Read_Data(u8 *temp,u8 *humi);
#endif
4 总结
程序还不是很完善,BUG有点多,这篇文章只能说提供个思路。实际应用的话,可能需要大改,比如说改成寄存器版本的。
需要工程源码的,等我后面再发个百度云链接。
工程源码下载:
关注“单片机”公众号,回复资源标识:2204141
————————————————
版权声明:本文为CSDN博主「死磕南墙」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_38203996/article/details/103328291













{kind=link}
暂无评论